Designing and Fabricating Mechanical Automata from Mocap Sequences
Duygu Ceylan, Wilmot Li, Niloy J. Mitra, Maneesh Agrawala, Mark Pauly
Abstract
Mechanical figures that mimic human motions continue to entertain us and capture our imagination. Creating such automata requires expertise in motion planning, knowledge of mechanism design, and familiarity with fabrication constraints. As a result, automaton design remains restricted to only a handful of experts. We propose an automatic algorithm that takes a motion sequence of a humanoid character and generates the design for a mechanical figure that approximates the input motion when driven with a single constant-speed crank. Our approach has two stages. The motion approximation stage computes a motion that approximates the input sequence as closely as possible while remaining compatible with the geometric and motion constraints of the mechanical parts in our design. Then, in the layout stage, we solve for the sizing parameters, interconnections, and spatial layout of all the elements, while respecting all fabrication and assembly constraints. We apply our algorithm on a range of input humanoid motions taken from motion capture databases. We also fabricate two of our designs to demonstrate the viability of our approach.
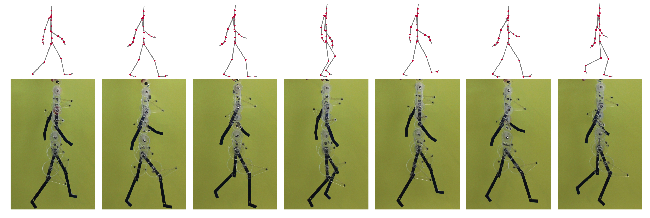
We present a method for generating the design of a mechanical automaton (bottom row) that approximates an input motion sequence (top row). Our algorithm automatically determines the configuration, dimensions, and layout of all mechanical components.